
Analisi numeriche interpretative della campagna sperimentale #terremotoISAAC con il software Midas Gen
Nell’articolo viene descritto il principio di funzionamento del sistema I-Pro 1, le prove di laboratorio su tavola vibrante e l’elaborazione dei modelli numerici rappresentativi della risposta dinamica di entrambi gli edifici mediante l’utilizzo del software Midas Gen.
Il sistema I-Pro 1 è un dispositivo di controllo attivo della risposta sismica che riduce le oscillazioni degli edifici grazie a forze di controllo calcolate in tempo reale. Le analisi FEM con Midas Gen dimostrano l’efficacia di questa tecnologia innovativa per migliorare la sicurezza sismica e proteggere le strutture da eventi estremi.
In questo articolo l'approfondimento tecnico.
La redazione di Ingenio
Come funzionano i sistemi di controllo attivo della risposta sismica?
I sistemi di controllo attivo della risposta sismica permettono di migliorare le performance dinamiche della costruzione e, contemporaneamente, monitorare la struttura h24. L’utilizzo di questi sistemi è già contemplato da normative internazionali, come la ISO 3010:2017, e indicato tra le tecnologie adottabili per il miglioramento della risposta sismica degli edifici di nuova costruzione o esistenti.
Il sistema I-Pro 1 è una macchina attiva ed intelligente per il controllo della risposta sismica di edifici esistenti costituito da quattro componenti base, opportunamente assemblati in un sistema di controllo attivo della risposta sismica. Nel dettaglio, il sistema si compone dei seguenti componenti principali:
- Macchine IP-D01: costituite dalle masse inerziali e le relative componentistiche elettro-idrauliche che vengono ancorate rigidamente all’edificio;
- Sensori IP-S: sensori accelerometrici analogici per il monitoraggio dinamico del fabbricato in continuo e durante l’evento sismico;
- Computer centrale IP-UT: computer centrale Real-Time per l’acquisizione ed elaborazione dei dati con gli algoritmi di controllo ISAAC;
- Batterie tampone IP-A: sistema di alimentazione con gruppo di continuità.
Lo scopo del sistema è quello di “contrastare”, grazie alla generazione di forze da parte di ogni macchina, il movimento dell’edificio riducendone le ampiezze di oscillazione e di conseguenza gli sforzi applicati sugli elementi strutturali. L’entità delle forze erogate è calcolata in tempo reale dagli algoritmi di controllo sulla base delle misurazioni accelerometriche dell’edificio stesso, tramite i sensori installati nei punti significativi del fabbricato.
Il sistema raggiunge la più alta efficienza quando le macchine sono collocate sulla copertura dell’edificio da proteggere, in modo da massimizzare la leva della forza erogata rispetto al suolo o, più in generale, contrastando il primo modo naturale della struttura.
Gli edifici target del sistema sono quelli a struttura portante in cemento armato od acciaio, aventi un numero di piani approssimativamente compreso tra 3 e 15. Il progetto della soluzione proposta si basa sull’esecuzione delle analisi strutturali dinamiche, identificando il numero di macchine IP-D01, e la relativa posizione in pianta, tali da determinare per l’edificio le performance obiettivo per ciascuno stato limite.
Descrizione della campagna sperimentale #terremotoISAAC
Le prove di laboratorio hanno avuto come obiettivo quello di dimostrare, secondo lo Stato dell’Arte, il funzionamento del sistema di controllo attivo I-Pro 1 installato su edifici in scala reale.
Per questo motivo, nei giorni 8/9/10 marzo 2021 nel laboratorio Shake-LAB di EUCENTRE, sono stati realizzati due edifici identici in scala reale in calcestruzzo armato con tamponature in mattoni forati di laterizio, di cui uno dotato del sistema di protezione. Entrambi poi sono stati sottoposti a sismi di intensità crescente attraverso tavola vibrante. Il confronto tra la distribuzione di danneggiamento e della domanda di spostamento nei due casi ha portato all’evidenza la protezione offerta dal sistema I-Pro1.
Per maggiori informazioni scarica l’articolo completo.

IMMAGINE 1: Gli edifici oggetto di prova nei laboratori EUCENTRE e particolare dell’installazione di I-Pro 1 sull’Ovest
Descrizione generale della modellazione adottata
Sono stati sviluppati diversi modelli FEM delle strutture, lineari e non lineari, in modo da calibrare i parametri decisivi che regolano la risposta dinamica del sistema. Essi hanno comunque condiviso l’adozione di elementi beam per le colonne ed elementi plate a quattro nodi per le mesh rappresentative delle solette di piano. Nel seguito, sono illustrate in modo schematico i dettagli della modellazione e le assunzioni adottate.
Modellazione del comportamento non lineare degli elementi in c.a.
Al fine di simulare nel modo più fedele possibile alla realtà il comportamento del c.a., alle colonne del telaio sono state assegnate cerniere plastiche, assegnando 10 punti di integrazione intermedi lungo lo sviluppo dell’elemento finito. Inoltre, è stato adottato per le singole fibre il legame costitutivo di Mander, tenendo conto del calcestruzzo confinato e no, nonché della sua resistenza a trazione. Sono state calcolate quindi le grandezze che definiscono il legame. Il modulo elastico tangente e la resistenza a trazione invece fanno riferimento alle correlazioni da NTC 2018 a partire dalle indagini sperimentali.
Per quanto riguarda l’acciaio d’armatura, è stato adottato il modello di Menegotto-Pinto, assegnando al tipico legame bilineare le seguenti grandezze: tensione di trazione ultima fy 450 MPa, modulo elastico Es 200 GPa e coefficiente di hardening 0.001.
Modellazione dei tamponamenti in muratura
L’interazione tra la deformabilità del telaio in c.a. e dei pannelli di muratura è stata descritta attraverso la modellazione di bielle diagonali equivalenti secondo il modello di Bertoldi et. al. (1993). Per matchare l’analisi modale sperimentale operata in fase preliminare (fI,x = 8.39 Hz, fII,x = 29.9 Hz), è stata calibrata una rigidezza assiale iniziale delle bielle tale da osservare un’adeguata corrispondenza tra i modi di vibrare in termini di frequenza e deformata modale nelle direzioni di sviluppo delle tamponature (direzione X).
Inoltre, per tenere conto delle aperture nei paramenti murari diffusi al livello di piano terra e piano primo, e per adottare un criterio per vincolare il problema, si è fatto uso della formulazione di Decanini (2014) che stima il fattore di riduzione delle proprietà meccaniche ρ di pareti in muratura con aperture rispetto alla corrispondente parete supposta integra. Sulla base della geometria delle aperture delle pareti al piano terra ed al piano primo si sono ottenuti rispettivamente i fattori di riduzione rispetto alle proprietà meccaniche della parete al piano secondo: 0.63 e 0.79.
Attraverso operazioni di model updating, è stata quindi identificata la seguente terna di rigidezze elastiche (rispettosa dei precedenti rapporti) da assegnare a ciascuno dei link diagonali che simulano i tamponamenti: Kel,PT = 90 kN/mm, Kel,P1 = 115 kN/mm, Kel,P2 = 145 kN/mm.
Le proprietà meccaniche non lineari sono poi state ricavate dal modello di Bertoldi et. al. (1993), il quale conduce all’ottenimento della stima della rigidezza Ewϴ e della resistenza del puntone equivalente Fw che è possibile riconoscere nel meccanismo resistente che si instaura nella parete ad un certo livello di deformazione raggiunta.
La rigidezza iniziale è determinata sulla base dell’analisi modale sperimentale e si è assunto che sia mantenuta fino al raggiungimento della resistenza al limite elastico ipotizzata. La rigidezza Ewϴ è invece stata adottata per caratterizzare il comportamento di secondo stadio fino alla resistenza di picco Fw. Una rigidezza residua pari all’0.1% di quella iniziale è stata considerata per descrivere le condizioni ultime dei pannelli.
All’interno del software di calcolo, questo comportamento è stato descritto mediante un General Link a cui è stata assegnata una cerniera plastica di tipo Slip Trilinear/Compression, ovvero un legame asimmetrico attivo solo in compressione.
Modellazione della macchina I-Pro 1
Il sistema I-Pro 1 si configura come un dispositivo di controllo attivo a tutti gli effetti, ed il suo comportamento è determinato da specifici algoritmi e logiche di controllo. Ciò fa sì che il device non possa essere accumunato ai classici dispositivi passivi che rispondono con forze stabilizzanti proporzionali a parametri cinematici della struttura e che sono definibili con un preciso legame costitutivo.
Tuttavia, se a posteriori si verifica che alcune ipotesi sulla meccanica del suo comportamento (rispetto della massima corsa e velocità della massa mobile) siano state rispettate durante la storia temporale di attività, è possibile approssimarne il funzionamento a quello di un semplice smorzatore non lineare, in quanto la forza da esso erogata è riconducibile al prodotto della velocità della struttura misurata nel punto di installazione per una costante di smorzamento.
Nel caso in oggetto, si è constatato che queste ipotesi sono state di fatto rispettate e pertanto si è proceduto a simulare la meccanica del dispositivo con quattro non linear dashpot assegnati in parallelo all’ultimo livello della struttura con approccio sky-hook.
Tra i dati di input è possibile distinguere il coefficiente di damping iniziale Ce di 37.5 kN*s/m, che va a determinare un coefficiente complessivo di 150 kN*s/m, valore pari al corrispondente parametro di settaggio del controllo del dispositivo. La variabile Relief damping force, invece, trova corrispondenza con la massima forza erogabile, pari a 158 kN. Oltre questa soglia, avviene la saturazione in forza del dispositivo e quindi un coefficiente prossimo allo 0 è stato attribuito al legame forza-velocità di secondo stadio.
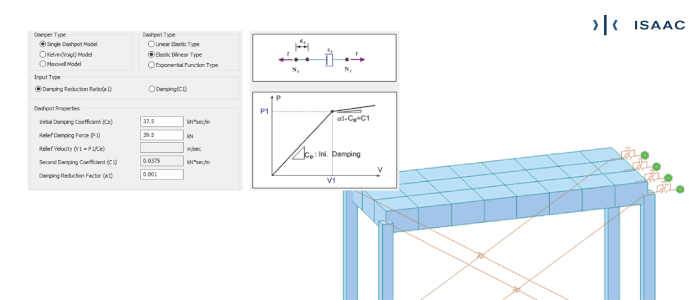
IMMAGINE 2: Modellazione sky-hook ed impostazione del link utilizzato per simulare I-Pro 1
Analisi dinamiche non lineari e confronti con le osservazioni sperimentali
La struttura, con tutte le proprietà non lineari degli elementi impostate come descritto nel capitolo precedente, è stata analizzata mediante non linear time histories in cui la sequenza di scuotimento sperimentale è stata assegnata come Ground acceleration in direzione X. Come tecnica numerica di soluzione dell’equazione del moto è stata utilizzata la Direct Integration con metodo di Newmark.
Per quanto riguarda la definizione dello smorzamento, si è optato per la formulazione di Rayleigh, in cui la matrice di smorzamento C è stata assunta proporzionale alla sola rigidezza strutturale K attraverso il coefficiente di proporzionalità λ. Per la sua determinazione, è stato assegnato un coefficiente di smorzamento modale, in corrispondenza della prima frequenza in fase elastica (circa 8.5 Hz), avente valore decrescente in funzione della progressiva intensità delle accelerazioni imposte per le varie compensate, da 5% ad 1%.
Edificio Est (Non controllato)
Nelle figure sono visualizzate le storie temporali dello spostamento dei tre piani dell’edificio ottenute dalle analisi numeriche e confrontate con quelle sperimentali per la compensata più significativa. Si osserva un ottimo accordo e ciò consente di confermare la predittività del modello numerico elaborato.
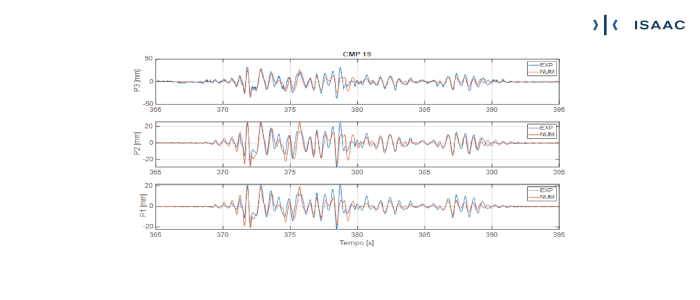
IMMAGINE 3: Spostamenti sperimentali e numerici dell’Edificio Est per la compensata 19
Nelle figure seguenti è possibile osservare la distribuzione finale delle fessurazioni e plasticizzazioni negli elementi in c.a. ottenute dal calcolo ed i cicli forza-spostamento registrati nei link rappresentativi dei tamponamenti al piano terra (in rosso), al piano primo (in verde) e al piano secondo (in blu). È possibile notare come, nonostante vi sia una diffusa estensione di zone che hanno raggiunto la condizione di fessurazione, solo le estremità delle colonne del piano terra abbiano superato la soglia di snervamento. Ciò appare in linea con le risultanze sperimentali in quanto il danneggiamento più significativo è stato localizzato proprio nelle sezioni di intradosso del primo solaio.
Inoltre, la sola parete al piano terra (linea rossa) ha accumulato significative deformazioni plastiche oltre al limite di resistenza, come di fatto è stato osservato sperimentalmente quando la parete ha subito un crollo parziale durante la compensata 19.
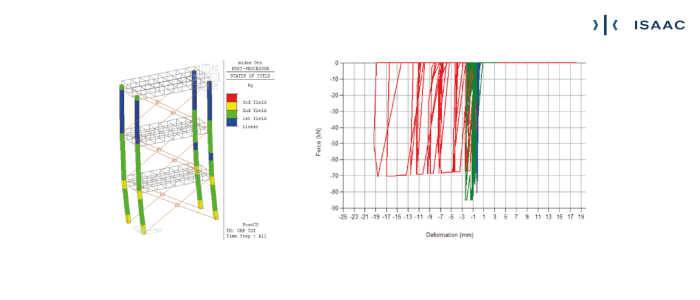
IMMAGINE 4: Distribuzione finale dello stato deformativo negli elementi in c.a e storie forza-spostamento nei link
Edificio Ovest (Controllato)
Per quanto riguarda l’edificio dotato del sistema di protezione I-Pro 1, le analisi dinamiche non lineari hanno fornito storie temporali degli spostamenti dei piani in ottimo accordo con quelle osservate sperimentalmente. La figura seguente illustra il confronto tra i risultati relativi alla compensata 19.
È stato possibile constatare che anche la risultante della forza di reazione dei link non linear dashpot utilizzati nel modello numerico è allineata ai valori della forza di controllo reale erogata durante la prova sperimentale.
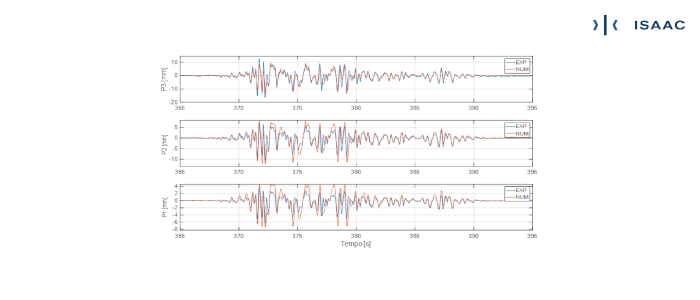
IMMAGINE 5: Spostamenti sperimentali e numerici dell’Edificio Ovest per la compensata 19
Per verificare l’accettabilità del modello meccanico di dashpot, scelto per simulare il dispositivo, occorre controllare a posteriori che la massa mobile abbia rispettato, durante il periodo di attività, il limite di corsa (0.5m) e di velocità (5m/s). In questo caso di sperimentazione al vero, tale informazione è nota e confermata, ed infatti il modello si è rivelato predittivo.
Tuttavia, nei casi di progettazione reale del sistema, è sufficiente procedere all’integrazione della storia temporale dell’accelerazione della massa mobile. Conoscendo la forza di controllo dall’analisi strutturale, infatti, è possibile ottenere la storia dell’accelerazione dividendola per il valore della massa: a(t) = F(t)/2200kg. L’integrazione numerica di tale segnale conduce alla storia della velocità; la successiva ulteriore integrazione conduce alla storia dello spostamento, e pertanto alla verifica del rispetto dei limiti massimi.
Conclusioni relative ai modelli numeri realizzati in Midas Gen
Nel presente contributo sono state descritte le prove sperimentali e le elaborazioni numeriche condotte in merito alla campagna test #TERREMOTOISAAC, le quali hanno fornito l’evidenza del funzionamento del sistema I-Pro 1 di ISAAC per la protezione sismica di edifici esistenti in c.a.
I test hanno interessato due edifici in scala reale realizzati nel laboratorio Shake-LAB di Eucentre sottoposti ad accelerazioni alla base crescenti, di cui uno dotato del dispositivo. Esso si configura come un Active Mass Damper e consente di contrastare le oscillazioni della sottostruttura erogando una forza di controllo calcolata sulla base di misure accelerometriche real time. L’esito delle prove è stata l’osservazione di assenza di danno per la struttura controllata e rilevanti danni ad elementi strutturali e non per quella non controllata, che hanno confermato l’alta efficienza del sistema.
È stata poi descritta l’attività di elaborazione dei modelli numerici interpretativi mediante il software di calcolo FEM Midas Gen. Si può concludere che le modellazioni hanno condotto a risultati in ottimo accordo con le risultanze sperimentali.
Pertanto, è stato inoltre possibile confermare la coerenza dell’approccio utilizzato per simulare il funzionamento dell’active mass damper I-Pro 1: poiché la forza di reazione da esso generata è direttamente proporzionale alla velocità del suo punto di applicazione, il dispositivo può essere trattato alla stregua di uno smorzatore viscoso non lineare, a condizione di verificare a posteriori che i limiti di corsa e di velocità della massa mobile siano rispettati durante il periodo di attività.
SCARICA* E LEGGI L'ANALISI COMPLETA (IN ALLEGATO)
*Previa registrazione al sito di INGENIO
PER APPROFONDIRE LEGGI L'ARTICOLO


Controlli e Diagnostica
Controlli e diagnostica nelle costruzioni: su INGENIO articoli, normative e tecnologie per garantire qualità e sicurezza di edifici e infrastrutture.

Sismica
Tutti gli articoli pubblicati da Ingenio nell’ambito della sismologia e dell’ingegneria sismica.

Software Strutturali
I software strutturali sono fondamentali per progettare in modo preciso e conforme alle normative. INGENIO raccoglie articoli, recensioni, guide e casi pratici per ingegneri e strutturisti.
Condividi su: Facebook LinkedIn Twitter WhatsApp