
Rilievo TLS e MMS di una delle più grandi piazze d'Europa grazie a un sistema laser scanner di ultima generazione
L'articolo descrive il test operativo effettuato da Microgeo con il nuovo sistema RIEGL VZ-600i. Le straordinarie performance, in termini di produttività e di precisione, di questo sistema sono state validate nello splendido contesto di Piazza Prato della Valle a Padova. Tutti i dettagli sulla campagna di rilievo condotta e le caratteristiche della tecnologia RIEGL impiegata.
Il rilievo realizzato con il sistema Laser Scanner RIEGL VZ-600i
L'innovazione tecnologica e quella di processo rappresentano per l'utente finale, un elemento essenziale per arricchire sia le competenze che le sue potenzialità commerciali.
Ed è con il nuovo sistema VZ-600i di RIEGL che l'innovazione arriva sul mercato con due focus operativi unici nel suo genere, e che riguardano la produttività e la precisione, oltre alla completezza degli aspetti legati dell'imaging e al posizionamento di livello RTK.
Nell'era dei Digital Twin queste funzionalità fanno la differenza e le caratteristiche di modularità ed efficacia della soluzione completano il range operativo, funzionale all'integrazione in workflow produttivi adatti alla digitalizzazione in modalità statica, ma anche dinamica.
La sperimentazione alla base del caso di studio, si è svolta in un contesto ad alta specificità, come quello di Piazza Prato della Valle a Padova.

Piazza Prato della Valle a Padova: analisi del contesto operativo
Prato della Valle è una delle più grandi piazze d’Europa ed è per questo motivo che è stata scelta per questo test operativo, poiché è stato possibile operare a diverse scale significative di un contesto sia urbano, che di ambito allargato al territorio.
D'altronde le caratteristiche del sistema VZ-600i si prestano ad operare, sia a scale urbane e architettoniche, sia a scale territoriali più ampie, impiegando il medesimo sistema in modalità dinamica come i sistemi MMS comunemente impiegati per il mapping su superfici di rilievo a scala urbano o extraurbana.
Nel test di campo per questo caso di studio, abbiamo quindi combinato il tradizionale impiego di scansioni TLS (Laser Scanner Terrestre), con scansioni dinamiche tipicamente acquisite con un sistema MMS (Mobile Mapping System) del tipo RIEGL VMQ-1HA.

Di fatto Piazza Prato della Valle si configura come un grande spazio urbano di 90.000 mq circa, caratterizzato da un’isola verde centrale e circondato da edifici storici con la presenza di numerose statue al suo interno.
Il test operativo condotto ha tenuto conto delle seguenti peculiarità del contesto:
- Area esterna di grandi dimensioni.
- Limitato numero di geometrie utili per l’allineamento nella parte centrale della piazza.
- Verifica di qualità dei dati acquisti alle diverse scale (urbana, architettonica, decorativa).
Laser Scanner: le caratteristiche del sistema VZ-600i di RIEGL
Il sistema VZ-600i ha diverse caratteristiche innovative e il livello di produttività la superiore rispetto ad altri sistemi è dovuto a diversi fattori, tra cui la funzionalità di registrazione a bordo delle scansioni acquisite.
Il test è stato condotto con un tempo di scansione di 30 secondi per ogni sessione, e una risoluzione di 6mm a 10 mt di distanza.
Il sistema presenta una versatilità estrema grazie al suo peso ridotto di soli 6 kg e la possibilità di impiego in modalità cinematica – RIEGL è attualmente l’unica azienda al mondo che abilita l’uso di un laser Scanner terrestre in modalità cinematica, attraverso il solo aggiornamento del software di bordo.
Inoltre, il sistema è dotato di tre camere interne che permettono di scattare le foto durante le scansioni per una colorazione ottimale della nuvola di punti.
Durante il test di campo tenuto a Padova, la modalità che abbiamo deciso di testare, in funzione del contesto operativo, è quella definita “Panorama6”, ovvero 6mm a 10 metri, che a vedere le indicazioni in fig.3, permette di eseguire fino a 480 postazioni di scansione in 8h di lavoro.

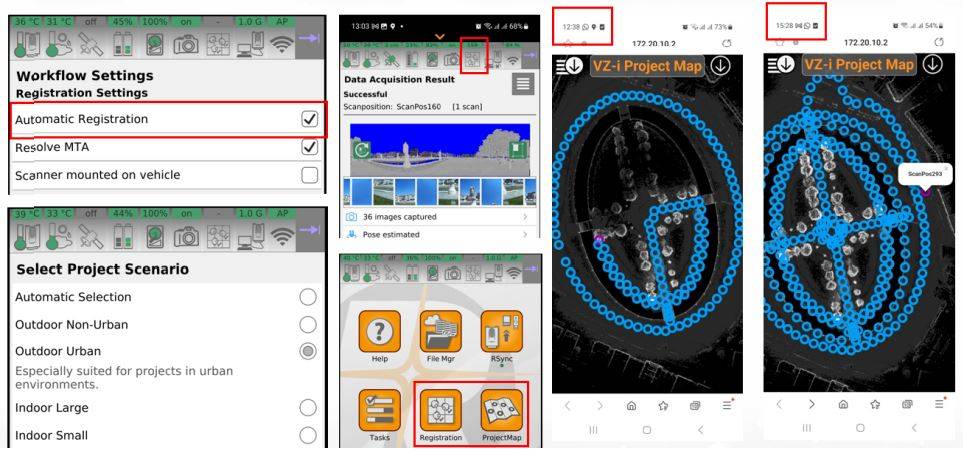
I report operativi
Nell'immagine in fig.4 si evidenziano i dati acquisiti con il nuovo sistema VZ-600i, nella fase di acquisizione di una scansione da un minuto.
Si possono notare da sinistra verso destra: il report generale, nuvola di punti a toni di grigio e l'immagine in RGB, i parametri geospaziali di posizione, precisione e stato del sistema GNSS in modalità RTK, oltre ai dati di attitude del sistema IMU.

Al di là dei dati della scena di ripresa, è possibile controllare in tempo reale altre informazioni significative, che vengono visualizzate attraverso una device di controllo di tipo tablet o smartphone, come si evidenzia in fig.5.
In questo modo è possibile visualizzare immediatamente l’allineamento delle scansioni a bordo macchina, cosi come lo stato di correlazione dell'intero set di scansioni eseguite nell’arco temporale del rilievo.
Le modalità operative avanzate del sistema di Laser Scanner
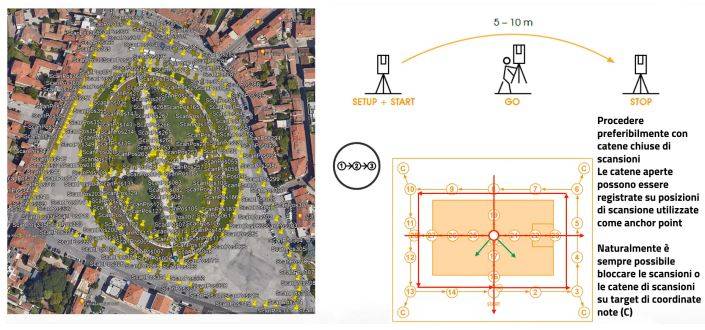
Grazie alle performance superiori del nuovo sistema RIEGL VZ-600i in termini di qualità e produttività, la strategia di scansione nella modalità stop&go, permette di fissare a 5-10 metri l'intervallo tra le stazioni di ripresa. Operando con catene chiuse di scansioni, si ottiene una maggiore densità delle nuvole di punti e una riduzione delle zone d’ombra, al contrario di quanto si ottiene con un sistema Laser Scanner tradizionale.
Le catene di scansioni aperte possono essere registrate su posizioni di scansione impiegate in modalità “anchor point”.
Naturalmente è sempre possibile bloccare le scansioni su target di coordinate note. Processo ben spiegato nella parte destra dell'immagine in fig.6.
Durante la sperimentazione in Piazza Prato della Valle, in sole 6h di scansione è stato possibile effettuare 375 postazioni con una media per singola scansione inferiore a 1 minuto, come si può evincere dal grafico di cui in Fig.7.
Come ben si evidenzia in fig.8 e seguenti, la densità di informazioni delle scene laser è omogenea e con una copertura a 360 gradi, oltre ad avere una ottima resa cromatica, indispensabile per un livello di visual rendering adeguato ai processi di "digital replica", propedeutici alla realizzazione dei gemelli digitali nell'ambito degli ambienti urbani e di complessi storici-architettonici.
L'effetto di visualizzazione in modalità solida è ottenuto ricampionando la point cloud attraverso il calcolo delle normali dei punti.
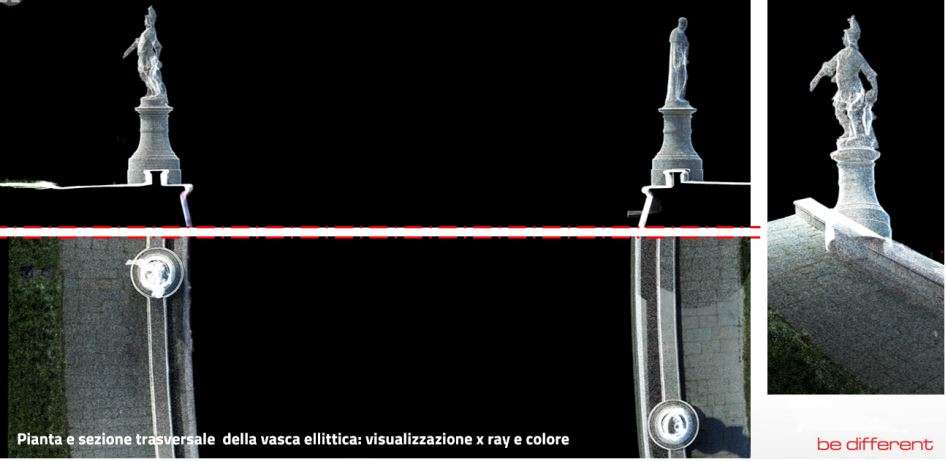
A seguire in fig.9, possiamo apprezzare un elaborato che mette in luce il livello di rappresentazione all’interno del quale ci possiamo spingere ancora oltre nella continuità e densità di rappresentazione. Questa è una sezione trasversale di una vasca, pianta e sezione, dove apprezziamo l’accuratezza e il dettaglio dello scanner VZ-600i, strumento unico nel poter combinare un elevato livello di risoluzione e qualità ad una portata massima di 1km.
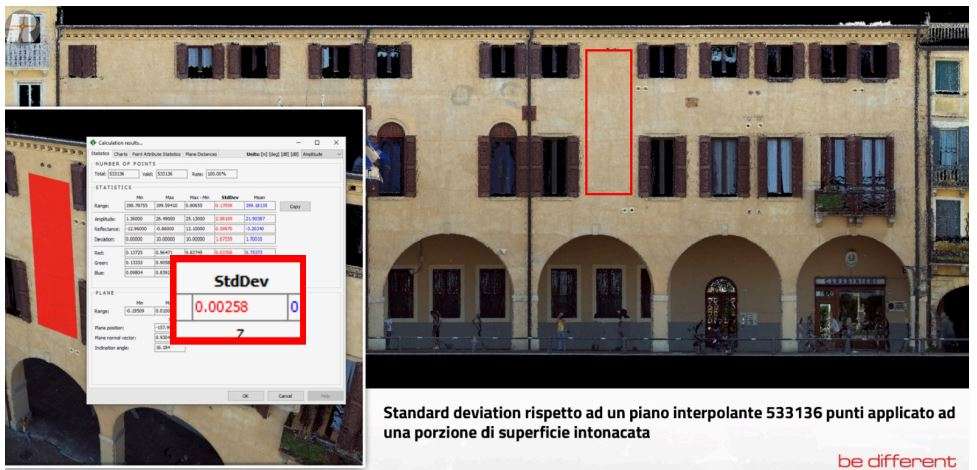
Un’ulteriore dimostrazione delle performance superiori di questo laser scanner terrestre può essere apprezzata in fig.10, dove si evince la deviazione standard di una porzione di parete scansionata - rettangolo rosso - i cui punti presentano una deviazione standard dal piano-prospetto interpolato, di solo 2mm. Un valore cosi basso della StdDev, denota bassa rumorosità ed elevata precisione del dato scansionato con il sistema VZ-600i.
[...] CONTINUA LA LETTURA NEL PDF ALLEGATO
Immagini


Geomatica
Tecnologie, metodi e applicazioni della geomatica per il rilievo, la gestione del territorio e la digitalizzazione del costruito. Articoli, casi studio e strumenti per tecnici e progettisti.

Rilievo 3D
Con questo TOPIC raccogliamo tutte le nostre pubblicazioni che riguardano il rilievo nelle costruzioni: i principi fondamentali, l’evoluzione degli strumenti e la loro applicazione, le tecniche, l’evoluzione normativa, le soluzioni tecnologiche, l’approfondimento di casi concreti, i pareri degli esperti.
Rilievo e Posizionamento
Il rilievo e il posizionamento rappresentano la base conoscitiva e operativa per ogni intervento edilizio e territoriale. Sono attività...
Condividi su: Facebook LinkedIn Twitter WhatsApp