
Rilievi 3D con LiDAR trasportato da drone per la creazione di modelli digitali del territorio
In questo articolo la descrizione della metodologia di rilievo LiDAR mediante l'uso del drone. All'interno anche alcuni casi applicativi.
Negli ultimi anni l’utilizzo dei sistemi Laser Scanner terrestri e LiDAR aerei, unitamente all’impiego delle ortofoto, ha comportato un notevole progresso nell’ambito dei rilievi, dello studio e della conoscenza sia di strutture, opere d’arte o del territorio. Recentemente ulteriori sviluppi tecnologici si sono avuti sia per i laser scanner terrestri, con l’integrazione nella nuvola di punti che rileva e registra contestualmente anche i valori di infrarosso termico, sia nell’ambito dei rilievi aerei, con l’introduzione di sensori LiDAR altamente performanti, che possono essere trasportati, unitamente a macchine fotografiche stereoscopiche, sotto i droni permettendo in tal modo di ottenere nuvole di punti ad alta densità spaziale e, quindi, ricostruzioni dettagliate del territorio.
Di seguito si riportano sinteticamente le caratteristiche del sistema di volo e di acquisizione e alcune esperienze realizzate da Tecno In Geosolutions con il Drone Lidar.
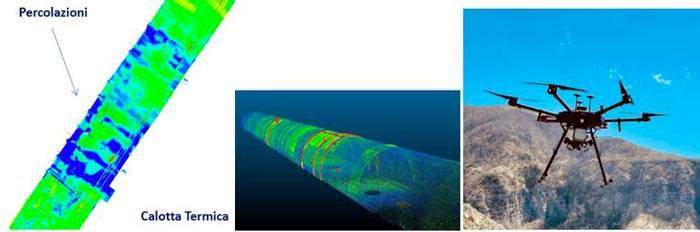
Figura 1 Esempio di rilievi Laser Scanner terrestre – nuvola di punti in galleria integrata con infrarosso termico e Drone LiDAR con fotocamere stereoscopiche
La vera novità degli ultimi anni nel rilievo? la percezione della realtà diventa "misurabile"
Rilevare un’opera, un luogo urbano, un territorio, significa tentare di stringere da più punti la realtà “ricostruendola” per successive approssimazioni in un modello geometricamente misurabile e qualitativamente valutabile. La finalizzazione condiziona il processo stesso di rilevamento e quindi le scelte e i criteri che orientano l’iterazione di mirate scomposizioni e ricomposizioni della realtà. In ogni caso, il modello finale, virtuale e analogo, si configura come un’interpretazione della complessità della realtà.
Da sempre gli strumenti e le metodologie di rilevamento, sia semplici che complessi, si confrontano con la dialettica tra campo dell’ottica e campo della geometria, tra percezione e misura. Sistemi polari e cartesiani di lettura e misurazione dello spazio convivono nel corso della storia, ma è soprattutto oggi, in relazione alle problematiche di decodificazione delle forme e delle relazioni dei contesti contemporanei, che si rende necessario affiancare alla scientificità della misura valutazioni qualitative determinate attraverso approcci induttivi di osservazione e rilevamento (riprese fotografiche, ecc.).
Rispetto a tutto questo, negli ultimi anni, l’impiego del Laser Scanner 3D, terrestre ed aereo, nella lettura e nella progettazione dell’architettura, delle strutture e del paesaggio urbano e naturale segna una vera e propria rivoluzione concettuale prima ancora che pratica. Ciò che è visibile a occhio nudo è rilevabile e quindi misurabile. Oggigiorno, in ambiti naturali e urbani, anche quello celato dalla vegetazione, è rilevabile. L’immagine si traduce in nuvole di punti (DDEM, dense data elevation model) con coordinate cartesiane. L’incontro tra misura e percezione è finanche sancito da software che plasmano le riprese fotografiche sul modello tridimensionale.
Diviene in altri termini possibile “misurare” la percezione della realtà e si ribalta il procedimento del rilievo tradizionale. La “clonazione” di porzioni di paesaggi in nuvole di punti e in modelli tridimensionali, analiticamente ispezionabili e misurabili dalle diverse angolazioni visuali, consente di studiare, analizzare ed estrapolare forme e relazioni della realtà fisica, fino alla traduzione immediata in numeri di rapporti qualitativi suggeriti da un approccio percettivo.
Solo in un secondo momento, in funzione degli obiettivi del progetto, si operano quelle scelte interpretative sui criteri di selezione e rappresentazione dei dati in grado di restituire le molteplici letture connaturate ai “pezzi” di realtà che le nuvole di punti riproducono fedelmente su scala ridotta e virtualmente gestibile.
In altri termini, se i metodi tradizionali di rilevamento assemblano progressivamente dati strutturali e percettivi tendendo alla costruzione di una sinergia sempre più esaustiva, qui tale sinergia costituisce la potenzialità del punto di partenza, una sorta di banca dati utilizzabile in vari modi e per diversi scopi, nel nostro caso progettuali.
Il rilievo LIDAR realizzato con l’ausilio del drone
In questa sede vogliamo descrivere un ulteriore importante recente progresso tecnologico nell’ambito del rilievo LIDAR, nello specifico il rilievo LIDAR realizzato con l’ausilio del drone. Gli scriventi, operano da svariati anni nell’ambito del rilievo ed elaborazione dati con Laser Scanner, sia terrestri che aerei, e hanno seguito e tratto beneficio dei successivi upgrade tecnologici succedutisi nel settore nel corso degli anni.
Per quanto concerne più in generale il rilievo del territorio, i modelli digitali del terreno (DTM) ad elevata definizione costituiscono un prodotto cartografico la cui domanda è in continua crescita. Sono richiesti comunemente come base progettuale per la realizzazione di opere infrastrutturali di varia natura e di interventi di sistemazione idraulica forestale, sono inoltre i dati di input per molti modelli numerici di simulazione di fenomeni fisici che interessano il territorio.
La qualità e l’attendibilità di questi elaborati è quindi strettamente legata all’affidabilità e alla precisione con cui sono definiti i DTM sui quali si basano.
Caratteresitiche e limiti del LiDAR da aereo
Già il LiDAR montato su aereo o elicottero ha rappresentato un notevole progresso nell’ambito del rilievo del territorio, in particolare ove presente la vegetazione. Va in ogni caso segnalato che, pur nella significativa quantità di informazione dei DTM LiDAR registrati da aereo, non vanno sottovalutati alcuni limiti connessi a questo tipo di dati che si manifestano in sede di analisi.
Il primo di tali limiti è legato alla precisione della tecnica di misura e alla scala di restituzione dei dati, infatti, in relazione alle quote di volo ordinariamente tenute, la precisione di misura è stimabile nell’ordine di +/- 60 cm per il singolo dato planimetrico rilevato, un secondo limite è relativo alla densità dei punti rilevati a terra che ordinariamente comporta che i prodotti finali siano elaborati e restituiti con maglia pari a 1 m. Tutto ciò impone normalmente di verificare sempre la presenza di manufatti a sviluppo lineare (spallette, muri di sponda) che potrebbero non essere adeguatamente restituiti dal DTM, nonché quella di varchi e discontinuità localizzate che potrebbero interrompere la continuità delle opere di contenimento senza comparire nel DTM stesso. In corrispondenza di tali specificità è opportuno disporre di rilievi topografici a terra che integrino localmente l’informazione LiDAR da aereo caratterizzando al meglio la geometria dei manufatti.
Tali vincoli sono ampiamente superati dal rilievo LiDAR da drone sia in relazione alla ridotta quota di volo, che alla minore velocità di spostamento, a parità di frequenza di campionamento. Sicuramente, in relazione al LiDAR montato su aereo o Elicottero, esiste un vincolo in riferimento all’estensione areale di sorvolo.
LiDAR: che cosa è e come funziona
LiDAR (light detection and ranging) è una tecnologia di rilevamento simile al radar, ma utilizza la luce anziché le onde radio. Applica i principi della luce riflessa e della precisione dei tempi di arrivo per misurare la distanza di un oggetto. È in grado di funzionare in tutte le condizioni di luce grazie all'approccio attivo che utilizza un trasmettitore di luce a infrarossi insieme a un ricevitore.
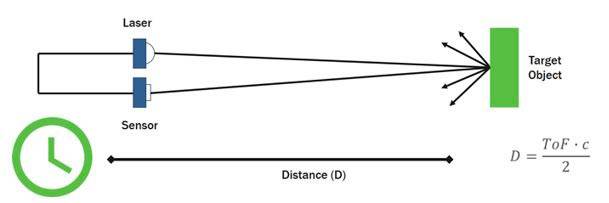 Figura 2 - Il tempo di volo diretto (dTOF) misura il tempo impiegato dalla luce per raggiungere il bersaglio e tornare indietro.
Figura 2 - Il tempo di volo diretto (dTOF) misura il tempo impiegato dalla luce per raggiungere il bersaglio e tornare indietro.
In un metodo alternativo, noto come LiDAR ToF indiretto (iToF), viene trasmessa un'onda sinusoidale continua di luce. iToF determina il tempo di volo (t) dalla differenza di fase tra le forme d'onda trasmesse e riflesse.
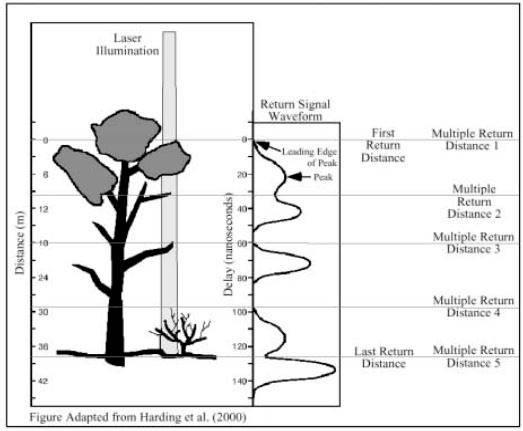
Figura 3 -Generazione di riflessioni multiple del raggio LiDAR nel caso di presenza di vegetazione
Dei due approcci, iToF è il più comune. In generale è il metodo migliore per applicazioni a corto raggio e funziona meglio dove i livelli di luce ambientale sono ben controllati.
Al contrario, dToF può essere utilizzato in applicazioni a lungo e corto raggio. Inoltre, offre un funzionamento più veloce e, aspetto fondamentale per i nostri obiettivi, può misurare più di un singolo eco, avendo quindi la capacità di rilevare più oggetti in profondità, nel nostro caso specifico la superficie del suolo quando celata dalla vegetazione.
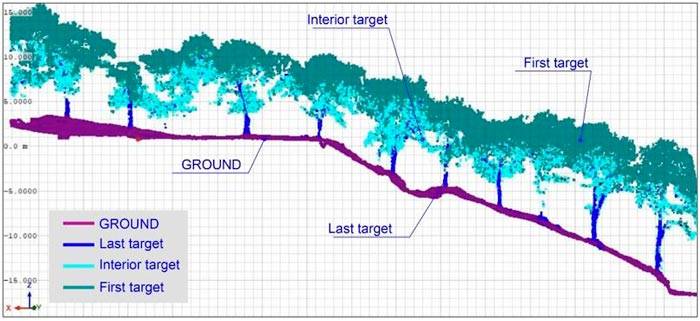
Figura 4 -Sezione di esempio in cui si evidenzia l’analisi della lunghezza d’onda
Sebbene la capacità di misurare la distanza di un target remoto sia molto utile, e utilizzata oggigiorno in molti altri settori (automotive ecc.), il vero punto di forza del LiDAR, quando abbinato a sistemi optoelettronici di scansione, risiede nella sua capacità di creare mappe 3D dettagliate e altamente accurate delle superfici a diversi fattori di scala, sia che si tratti di un oggetto in un ambiente definito o a una scala più grande, un manufatto o rilievi di porzioni di territorio.
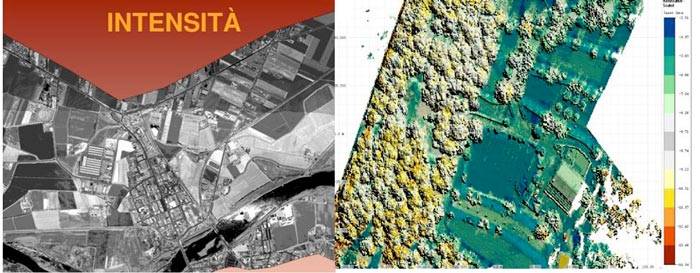
Figura 5 - Esempio di mappa di riflettanza in toni di grigio e colore
Il quarto parametro del punto della nuvola: la riflettanza. Ma cosa indica?
Ogni singolo punto della nuvola è caratterizzato da quattro parametri, le tre coordinate spaziali X,Y,Z, georeferenziate e da un quarto valore, sovente trascurato, che fornisce al contrario una serie di informazioni, la “riflettanza”. Ogni target colpito dal raggio laser, riflette il segnale con una intensità relativa dipendente dal tipo di materiale di cui è composto. Il risultato è un’immagine in scala cromatica, sovente si utilizza quella dei toni del grigio, in cui si possono visualizzare in relazione alle singole caratteristiche fisiche, nel nostro caso sul territorio, i diversi elementi colpiti dal raggio. Gli elementi come ad esempio l’acqua, che nella lunghezza d’onda dell’infrarosso assorbe completamente il segnale e non ha quindi riflessione, nella scala dei grigi risulta pertanto nera. Questo indipendentemente dall’associazione dei valori RGB associati all’ortofoto che viene prodotta contestualmente.
Breve descrizione della metodologia
Nell'ultimo decennio è stata sviluppata una nuova tecnica di rilevamento digitale territoriale denominata Mobile Mapping. Il termine Mobile Mapping (MM) identifica le tecniche di rilievo che fanno uso di veicoli in movimento (come autoveicoli, imbarcazioni, treni e droni). L'acronimo MMS (Mobile Mapping System) indica, invece, il sistema di rilevamento, ovvero l'insieme delle apparecchiature Hardware e Software installate.
Si tratta di un sistema di rilevamento integrato, le cui prestazioni globali consentono l'acquisizione di un modello numerico reale costituito da nuvole di punti perfettamente geo riferite e classificate.
Ogni apparecchiatura costituente la piattaforma acquisisce i dati in maniera indipendente; successivamente attraverso software di gestione, si correlano i dati acquisiti con la traiettoria di navigazione del sistema generata dai dati GPS (WGS84). Attraverso l'allineamento dei dati acquisiti sulla traiettoria si genera la nuvola di punti (point cloud) geo riferita.
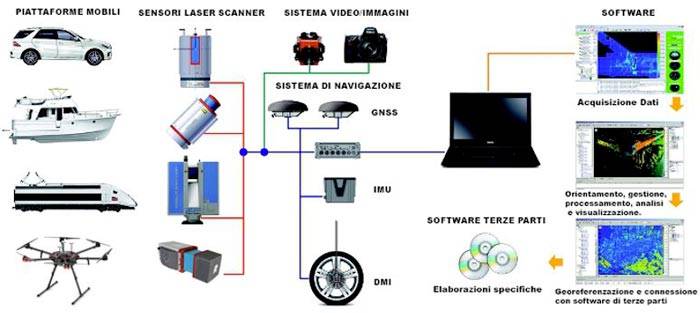
Figura 6 - Schema "Mobile mapping Laser Scanner 3d"
L’ultimo sistema Mobile mapping utilizzato da Tecno In Geosolutions è un LIDAR da drone composto da un sensore di acquisizione Laser scanner 3d modello MINI VUX-3 UAV della RIEGL, montato su un drone della DJI, modello Matrice 600 pro. Il sistema è integrato da un apparato di navigazione e orientamento composto da una piattaforma inerziale Applanix SW14 (IMU), antenna GPS e due fotocamere coassiali usate per colorare la nuvola. L’antenna GPS fornisce posizione, orientamento globale e tempo assoluto (1 sec.). Quest'ultima informazione, detta "time stamp", permette di sincronizzare tutte le informazioni provenienti dai vari sensori in un unico modello. Ad ogni tempo è infatti associata una singola linea di scansione, gli spostamenti registrati dalla piattaforma inerziale e la posizione misurata dal GPS.
La IMU (Inertial Movement Unit) misura le accelerazioni lineari ed angolari date al sistema in movimento (pitch-roll-yaw) e consente di calcolare con precisione la traiettoria percorsa dal veicolo in movimento, permettendo di correggere tutti gli spostamenti che il sistema riceve durante il movimento.
Il sistema è dotato di un sensore laser scanner 3D che permette di rilevare con elevata precisione la geometria tridimensionale dello scenario indagato. Le due fotocamere modello Sony α6000, posizionate sotto il sensore laser permettono di colorare le scansioni (RGB) in fase di post processing attraverso il "time stamp", sincronizzato con la IMU.
Continua la lettura dell'articolo integrale nel PDF scaricabile previa registrazione
All'interno anche la descrizione di alcuni casi applicativi



Digitalizzazione
Scopri la digitalizzazione in edilizia: BIM, digital twin, cantiere digitale, piattaforme collaborative e normative. Su INGENIO articoli tecnici e casi reali per innovare il mondo delle costruzioni.
Geomatica
Tecnologie, metodi e applicazioni della geomatica per il rilievo, la gestione del territorio e la digitalizzazione del costruito. Articoli, casi studio e strumenti per tecnici e progettisti.
Rilievo 3D
Con questo TOPIC raccogliamo tutte le nostre pubblicazioni che riguardano il rilievo nelle costruzioni: i principi fondamentali, l’evoluzione degli strumenti e la loro applicazione, le tecniche, l’evoluzione normativa, le soluzioni tecnologiche, l’approfondimento di casi concreti, i pareri degli esperti.
Rilievo e Posizionamento
Il rilievo e il posizionamento rappresentano la base conoscitiva e operativa per ogni intervento edilizio e territoriale. Sono attività...
Territorio
Gestione e sviluppo sostenibile del territorio: su INGENIO articoli, normative e strategie per pianificazione urbana e tutela ambientale.
Condividi su: Facebook LinkedIn Twitter WhatsApp