
Rilievo digitale: guida alla scelta del Sistema LiDAR SLAM e di Imaging 3D
I sistemi LiDAR SLAM stanno rivoluzionando il rilievo geo-topografico, la creazione di Digital Twin e le tecniche di rilievo per ambienti complessi. Pilastri dell’innovazione moderna, sono strumenti capaci di generare modelli digitali altamente precisi. Ma quali sono i parametri da considerare per scegliere il giusto sistema?
Questa nota editoriale esplora alcuni aspetti pratici per aiutare operatori e tecnici nello scegliere la soluzione più adatta alle loro esigenze, ottimizzando efficienza e costi a seconda della tipologia e complessità del rilievo.
In particolare, l’attenzione si concentra sulle soluzioni LiDAR SLAM che presentano una efficienza operativa superiore rispetto ai tradizionali sistemi Laser Scanner di tipo statico (TLS) , sia in termini di potenziale produttivo, sia nella facilità d’uso che nel risultato comparato tra specifiche dell’applicazione e processo di elaborazione.
Differenze tra Sistemi LiDAR SLAM e Sistemi di Imaging
I sistemi LiDAR SLAM e quelli di Imaging 3D condividono l’obiettivo di raccogliere informazioni spaziali e tridimensionali, ma hanno approcci, obiettivi e modalità di utilizzo differenti.
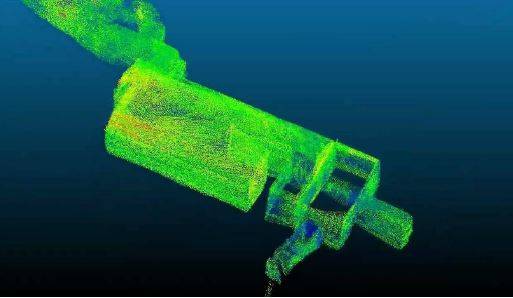
I sistemi LiDAR SLAM (Simultaneous Localization and Mapping) sfruttano sensori LiDAR per emettere impulsi laser e misurare il tempo di ritorno del segnale riflesso dagli oggetti circostanti. Ciò consente di determinare con precisione le distanze, generare mappe tridimensionali dettagliate dell'ambiente e, al contempo, localizzare il dispositivo in tempo reale all'interno delle mappe stesse. Questi sistemi sono progettati per operare in movimento, adattandosi a contesti dinamici e gestendo incertezze grazie ad algoritmi avanzati. È proprio questa capacità di combinare mappatura e localizzazione che li rende indispensabili in settori come la robotica, i veicoli autonomi e tutte quelle applicazioni in cui è importante interagire con l’ambiente in modo dinamico.
I sistemi di imaging 3D, invece, possono adottare diverse tecnologie, tra cui LiDAR, fotogrammetria o sensori a tempo di volo (ToF). Il loro scopo principale è la creazione di rappresentazioni tridimensionali estremamente dettagliate di oggetti o ambienti, concentrandosi soprattutto sulla qualità visiva e sulla precisione dei modelli. Questa caratteristica li rende particolarmente utili in campi come la realtà virtuale, la produzione di contenuti per videogiochi o film, la progettazione architettonica e la conservazione dei beni culturali. A differenza dei sistemi LiDAR SLAM, i sistemi di imaging 3D non sono necessariamente progettati per operare in movimento e trovano la loro forza nella ricostruzione di dettagli statici.
In sintesi, i sistemi LiDAR SLAM eccellono nelle applicazioni dinamiche, come la navigazione in tempo reale e la mappatura in movimento, mentre i sistemi di imaging 3D si distinguono per la loro capacità di creare modelli visivamente accurati, ideali per applicazioni estetiche o analitiche. Sebbene diversi, questi approcci si completano a vicenda, rispondendo a esigenze specifiche.
Questa nota editoriale nasce proprio dall’esigenza di fare chiarezza sui sistemi di rilievo mobile, una categoria di strumenti estremamente versatili che abbraccia tecniche avanzate di imaging, come quelle sviluppate nella fotogrammetria di quarta generazione, applicabili a molti settori. Tra questi, i sistemi SLAM basati esclusivamente su imaging non sono particolarmente diffusi, a causa di alcune limitazioni tecniche. Il principale vincolo dell’imaging è la necessità di condizioni di illuminazione adeguate, oltre a una maggiore sensibilità a fattori ambientali.
Questi sistemi, noti come Visual SLAM, includono poche soluzioni attualmente disponibili sul mercato. Tra le più rilevanti vi sono il sistema XVS di STONEX e Looq Platform di un produttore statunitense, che integra anche un modulo GPS.
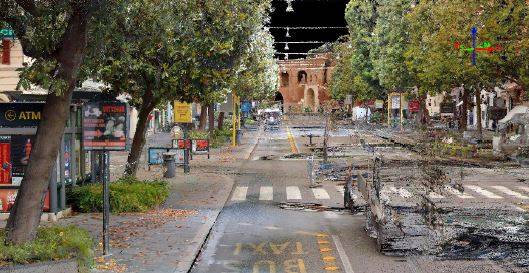
Tuttavia, va sottolineato che quasi tutti i sistemi LiDAR SLAM oggi includono fotocamere, utilizzate principalmente per "colorare" le nuvole di punti con valori RGB. In alcuni casi, le immagini acquisite vengono elaborate con tecniche SfM (Structure from Motion) per integrare e migliorare le nuvole di punti generate dal LiDAR.
Diversamente dai sistemi Visual SLAM, i sistemi puramente basati sull’imaging sono precedenti all’avvento delle tecnologie SLAM. Esempi celebri sono le camere a 360°, come quelle utilizzate da Google Street View, che consentono di realizzare copie visive fedeli della realtà, navigabili in tutte le direzioni. Questi sistemi creano una rappresentazione visiva completa dei luoghi e dei manufatti, offrendo una visione immersiva e dettagliata dell’ambiente.
I sistemi di imaging di ultima generazione sono ora dotati di sensori IMU, che permettono di generare nuvole di punti simili a quelle derivate da rilievi LiDAR. Tuttavia, il processo di elaborazione è più complesso e lungo, e i risultati finali presentano caratteristiche diverse rispetto ai rilievi LiDAR SLAM.
Recentemente sono comparsi sul mercato anche sistemi misti, che combinano diverse tecnologie, sebbene con una precisione inferiore. Un esempio noto è il sistema Matterport, inizialmente basato su un approccio image-only. Matterport ha però successivamente integrato un LiDAR con portata fino a 100 metri, abbandonando le versioni solo-imaging. Nonostante questa evoluzione, il sistema però non utilizza un approccio SLAM.
Questa evoluzione tecnologica riflette la crescente diversificazione e specializzazione dei sistemi di rilievo mobile, ognuno progettato per soddisfare esigenze specifiche nei rispettivi campi di applicazione.
Tecnica o soluzione? Come è fatto un sistema LiDAR SLAM
Il termine SLAM ha origine nel mondo della robotica, lo stesso ambito da cui proviene la tecnica del LiDAR SLAM, sviluppata per rispondere alle esigenze di localizzazione e mappatura simultanea nei sistemi autonomi.
Il termine SLAM, acronimo di Simultaneous Localization And Mapping, si riferisce a una tecnologia che combina diversi sistemi e tecniche per localizzazione e mappatura simultanea.
Dotando un sistema di un sensore IMU (Inertial Measurement Unit), tipicamente utilizzato per determinare le traiettorie di oggetti in movimento, è possibile tracciare il percorso del dispositivo mentre si eseguono rilievi LiDAR, si catturano immagini o si raccolgono altre tipologie di misurazioni. Questa integrazione permette di mappare l'ambiente con precisione, utilizzando più tipologie di dati in sinergia.
I sistemi SLAM si basano essenzialmente su una tecnica di time tagging, in cui per ogni dispositivo coinvolto nel sistema (LiDAR, IMU, telecamera, ecc.) viene registrato il momento esatto in cui compie un'azione, insieme alle coordinate calcolate rispetto alla traiettoria in cui si trova. La combinazione dei dati dell’IMU e della sua posizione geometrica rispetto al centro analitico del sistema consente di determinare anche l'orientamento dei tre assi del vettore-sistema, fornendo una base iniziale per il processo di calcolo.
Tuttavia, la determinazione finale delle coordinate tridimensionali millimetriche (ad esempio, per gli spot LiDAR o i punti nodali generati da altri dispositivi) e la costruzione della nuvola di punti del laser scanner non si basano solo sui dati fisici delle misure di traiettoria e orientamento. Questo risultato è ottenuto tramite algoritmi complessi che includono anche l’analisi dei cosiddetti feature points: geometrie caratteristiche del manufatto e del suo contesto, utilizzate per ottimizzare la precisione del modello.
Considerando che i sistemi LiDAR possono operare su tre assi e rilevare decine di migliaia, o addirittura milioni, di punti al secondo, gli algoritmi devono essere estremamente avanzati e robusti. Le variabili in gioco sono numerose, così come le dimensioni delle matrici di calcolo, che possono arrivare a contenere centinaia o migliaia di indici. Questo comporta un notevole impegno computazionale per garantire precisione e affidabilità.
Oltre agli aspetti algoritmici e matematici, un sistema LiDAR SLAM per il rilievo geo-topografico integra una varietà di componenti e funzionalità pratiche e operative. Tra queste spiccano il software di acquisizione e, soprattutto, il software di post-produzione, che gioca un ruolo cruciale nella gestione e nell’elaborazione dei dati.
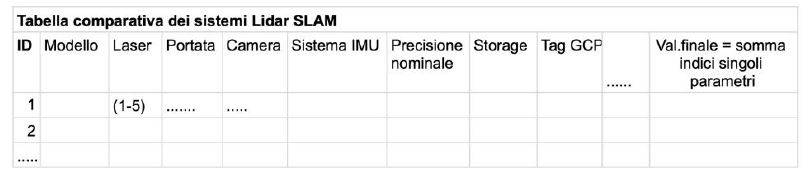
Per orientarsi nella scelta di un sistema LiDAR SLAM adeguato alle proprie esigenze operative, tecniche e di budget, ho riassunto in Tab. 1 alcuni dei principali criteri da tenere in considerazione. Attraverso questa guida vorrei mettere in evidenza gli elementi essenziali per riuscire a identificare lo strumento più adatto.
Infine, è importante sottolineare che la tecnica SLAM applicata al rilievo geo-topografico ha conosciuto una significativa evoluzione solo negli ultimi 15 anni. Questo progresso ha coinvolto sia gli aspetti algoritmici sia quelli tecnici e ingegneristici dei sistemi, portando alla differenziazione delle varie tipologie di SLAM, che analizzeremo nel paragrafo successivo.
Tipologie di Sistemi SLAM: Rover, a Spalla, Mobile…
Come abbiamo visto fino ad ora, i sistemi SLAM sono ormai diffusi e ben conosciuti, ma entrando nei dettagli operativi ci rendiamo conto che le soluzioni sono spesso fortemente diversificate, sia come tipologia di mounting che come caratteristiche e usabilità.

La maggior parte dei sistemi SLAM è concepita come Mobile, ossia progettata per operare in movimento. Di seguito riportiamo una classificazione delle cinque tipologie principali di mounting.
SLAM tipo ROVER o portatile
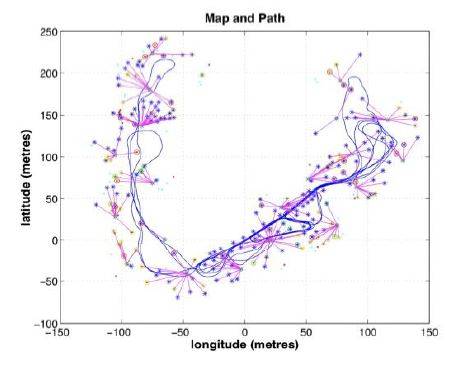
Sebbene non sia il termine tecnico più preciso, questo tipo di sistema si riferisce a dispositivi che vengono trasportati manualmente, generalmente da un operatore che segue a piedi un percorso predefinito, progettato per completare l'intero rilievo in una sola missione. Una caratteristica distintiva del rilievo SLAM geo-topografico è la chiusura ad anello delle acquisizioni: il percorso del rilievo termina nel punto in cui è iniziato. Questa pratica consente, durante i complessi calcoli di elaborazione, di compensare l'intero dataset, migliorando l'accuratezza e la coerenza dei dati raccolti.
SLAM a spalla o zainetto
Si tratta di sistemi LiDAR SLAM più avanzati e complessi, spesso dotati di ulteriori dispositivi integrati, come set di telecamere di alta qualità o anche due o più sensori LiDAR. Questi sistemi, a causa delle loro dimensioni e peso, sono generalmente montati su zainetti indossabili, che possono variare in peso e comfort a seconda della configurazione. Alcuni sistemi sembrano dei veri e propri esoscheletri. L'integrazione di due sensori LiDAR nella struttura del sistema offre un vantaggio significativo: aumenta la densità del rilievo, migliorando la precisione finale e riducendo in modo significativo il "rumore" nella nuvola di punti generata.
SLAM mobile o a bordo di un vettore
Negli ultimi due/tre anni sono stati introdotti sul mercato sistemi multiuso, progettati per offrire una grande versatilità. Questi sistemi possono essere installati su un veicolo, montati su una struttura a zainetto o utilizzati come carico utile per un sistema di volo UAV (drone), adattandosi così a diverse esigenze operative.
Sistemi SLAM Stop & Go
A mio avviso, questi sistemi possono essere considerati come la miglior soluzione per il rilievo geo-topografico, che pian piano andrà a sostituire l'effettiva modalità della celerimensura geo-topografica. Una tesi questa già sposata come potenzialità possibile per il rilievo tradizionale e che è stata approfondita in questo articolo pubblicato di recente su INGENIO. Grazie alla nuova modalità denominata Stop & Go, è possibile combinare il rilievo dinamico, tipico dei sistemi SLAM, con una procedura di Fix Surveying che prevede di fermarsi per alcuni secondi su un punto fisso. Questo approccio consente di sfruttare il sistema per ottenere una precisione elevata, a patto che la qualità del LiDAR sia adeguata. Si possono così raggiungere livelli di accuratezza dell'ordine di +/- 5 mm, paragonabili alla precisione nominale di una celerimensura tradizionale eseguita con una stazione totale e una documentazione accurata dei punti rilevati.
Sistemi MMS (non propriamente LiDAR SLAM)
I sistemi MMS possono considerarsi come i primi sistemi che hanno coniugato le misure LiDAR con quelle derivate da camere fotografiche, in cui tutto era integrato a bordo di una piattaforma rigida, integrata da sistemi IMU di altissima qualità.
Questi strumenti di rilievo venivano montati a bordo dei veicoli mentre a bordo del mezzo erano istallati monitor e stazioni PC che permettevano di rilevare anche centinaia di chilometri di strade, ferrovie, gallerie e quant'altro, così come anche gli scenari urbani di intere città.
A partire dagli anni '90, queste piattaforme si sono diffuse a livello globale, dando impulso a numerose aziende di servizi che hanno basato la loro attività su queste tecnologie, inclusi alcuni nomi di spicco italiani. Con l'introduzione di sensori LiDAR compatti, telecamere di alta qualità e, successivamente, della tecnica LiDAR SLAM, i sistemi sono diventati sempre più compatti e facilmente trasferibili da un mezzo all'altro. Questo sviluppo ha eliminato la necessità di dedicare un veicolo esclusivamente a una singola attività. I sistemi MMS (Mobile Mapping System) si sono così evoluti in soluzioni trasportabili, facilmente installabili su veicoli comuni o mezzi noleggiabili all'occorrenza, aumentando la flessibilità operativa e riducendo i costi logistici.
Parametri da considerare per la scelta di un sistema SLAM
Siamo finalmente arrivati allo scopo di questo lavoro editoriale. Ovvero la valutazione comparativa che ogni utente deve cercare di fare prima di selezionare la giusta soluzione per i suoi obbiettivi.
Le potenzialità del sistema, il relativo costo e le prospettive future in termini di opportunità di business rappresentano aspetti fondamentali da considerare quando si valuta un investimento in una tecnologia o un sistema. È il concetto classico di Return on Investment (ROI), un parametro cruciale che tutti analizziamo attentamente quando si tratta di allocare risorse in modo strategico.
In generale, la scelta di un sistema nasce dalle esigenze specifiche e dagli obiettivi prefissati. Per iniziare, è utile concentrarsi su una rosa ristretta di parametri chiave da valutare per ciascun sistema disponibile sul mercato.
Tuttavia, ci sono altri fattori che possono influire sulla decisione, come la fiducia nel venditore, la disponibilità di budget, la qualità dell’assistenza tecnica soprattutto in caso di problemi o di progetti complessi, e altri aspetti meno tangibili. Spesso, la scelta può essere complicata dalla mancanza di esperienza con la tecnologia o il sistema in questione, rendendo difficile un’analisi completamente analitica.
Per affrontare queste difficoltà, il metodo più efficace è iniziare con una short list di parametri essenziali per effettuare una prima comparazione. Se la scelta riveste un'importanza strategica, è consigliabile espandere questa lista includendo ulteriori criteri, approfondendo così il range di valutazione. Nel nostro caso, abbiamo elaborato una lista dettagliata che comprende i seguenti elementi:
Laser - Portata - Camera - Sistema IMU - Precisione nominale - Storage - Tag GCP - Modalità operative - Algoritmo di calcolo - Software a corredo - Rumore - Densità - Precisione finale - Piattaforma cloud - Prezzo minimo iniziale - Accessori - Maneggevolezza – Assistenza Tecnica.
Il vero nodo da affrontare è comprendere quali siano le reali esigenze operative. Sebbene a prima vista i sistemi LiDAR SLAM possano sembrare simili, le differenze tra di essi sono significative, soprattutto in termini di funzionalità, prestazioni, precisione raggiungibile.
[...] CONTINUA LA LETTURA NEL PDF IN ALLEGATO
L'articolo prosegue spiegando nel dettaglio la short list dei parametri essenziali da tenere in considerazione nella scelta di un Sistema SLAM LiDAR.


Digital Twin
Il Digital Twin è il gemello digitale di un edificio o infrastruttura, aggiornato in tempo reale: una rivoluzione per progettazione, manutenzione e gestione del costruito. Scopri la guida INGENIO.

Geomatica
Tecnologie, metodi e applicazioni della geomatica per il rilievo, la gestione del territorio e la digitalizzazione del costruito. Articoli, casi studio e strumenti per tecnici e progettisti.

Rilievo 3D
Con questo TOPIC raccogliamo tutte le nostre pubblicazioni che riguardano il rilievo nelle costruzioni: i principi fondamentali, l’evoluzione degli strumenti e la loro applicazione, le tecniche, l’evoluzione normativa, le soluzioni tecnologiche, l’approfondimento di casi concreti, i pareri degli esperti.
Rilievo e Posizionamento
Il rilievo e il posizionamento rappresentano la base conoscitiva e operativa per ogni intervento edilizio e territoriale. Sono attività...
Condividi su: Facebook LinkedIn Twitter WhatsApp